Research研究内容
身体を持つ機械が経験を通じて学習し、より良く行動するための方法論の導出に向けた研究を進めます。
研究設備

Torobo
東京ロボティクス社製のヒューマノイドロボット。各腕7軸、腰3軸、首3軸の関節を持ち、人の生活環境で作業を代替することが期待されます。関節トルクのフィードバック制御が可能で、力を微調整することが求められるような組立作業や料理、人との物理的インタラクションなどをより安全かつ巧みに実行することができます。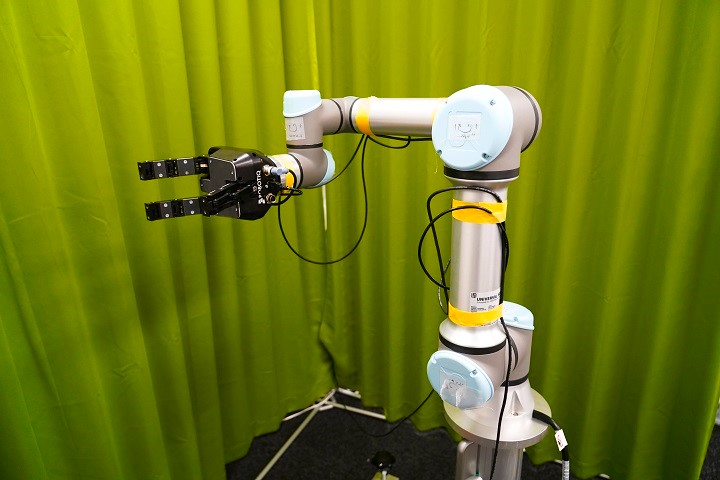
UR5e
ユニバーサルロボット社製の産業用アームロボット。広い可動域と中程度の可搬重量で様々なアプリケーションに対応しています。また、mujocoやROS2を用いたオープンソースのソフトウェア開発に対応しており、運動学習の研究に適したロボットです。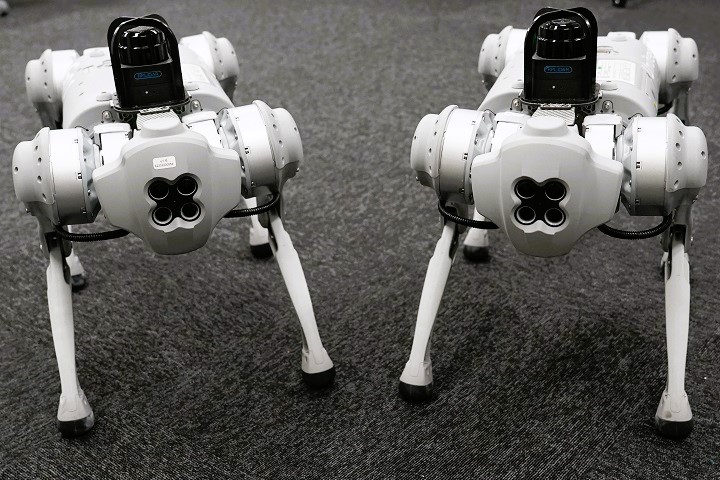
Go1
ユニツリー社製の小型電動4足歩行ロボット。優れた運動性能を有しており、人の生活環境を自在に歩行することができます。歩行制御とロボットに搭載されたセンサー機能を組み合わせた強化学習に基づくナビゲーションの研究に応用できます。
D’Kitty
グーグルブレインによって開発されたロボットの運動制御研究用のベンチマーク環境。12個の関節を持つ卓上の四足歩行ロボットで、 低コストかつ簡単に組み立てることができます。
計算機クラスター
機械学習・強化学習を円滑に行うための高性能なコンピューターで構成される計算機クラスターを設置しています。