Publications研究業績
2024
2024
2024
2024
Conference Papers

-
古巻鉄平, 八木聡明, 山森聡, 森本淳 (2024)
事前方策学習による低次元行動空間抽出と実環境における物体操り動作獲得
電子情報通信学会第54回情報論的学習理論と機械学習 (IBISML) 研究会

-
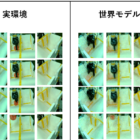
竹中郁弥, 山森聡, 森田光紀, 八木聡明, 森本淳 (2024)
世界モデル学習とそれを用いたモデル予測制御の実時間・実環境応用に向けた検討
電子情報通信学会第54回情報論的学習理論と機械学習 (IBISML) 研究会
-
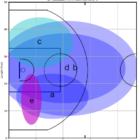
石津敦弥, 山森聡, 八木聡明, 森本淳 (2024)
世界モデルにおける異なる視点からの状態推定についての検討
電子情報通信学会第54回情報論的学習理論と機械学習 (IBISML) 研究会

-
甲斐舜也, 八木聡明, 後藤祐汰, 山森聡, 森本淳 (2024)
階層強化学習を用いた四脚ロボットの異なる床環境に対する歩行方策適応
電子情報通信学会ニューロコンピューティング研究会

-
小幡岬, 八木聡明, 山森聡, 森本淳 (2024)
動的な非協力ゲームとしての複数エージェント経路探索問題の検討
電子情報通信学会ニューロコンピューティング研究会
-
小作貴司, 山森聡, 八木聡明, 森本淳 (2024)
マルチエージェント模倣学習に向けた役割推定と動作模倣に関する考察
電子情報通信学会ニューロコンピューティング研究会

-
Eisuke Matsubara, Satoshi Yagi, Yuta Goto, Satoshi Yamamori, Jun Morimoto (2024)
Improvement of Fault Tolerance of Quadruped Robots by Detecting Correlation Anomalies in Sensor Signals (Best Paper Award)
7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (AROB-ISBC-SWARM 2024)

-
Sho Takeda, Satoshi Yamamori, Satoshi Yagi, Jun Morimoto (2024)
An Empirical Evaluation of A Hierarchical Reinforcement Learning Method towards Modular Robot Control
7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (AROB-ISBC-SWARM 2024)
2023
2023
2023
2023
Conference Papers
-
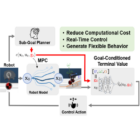
森田光紀、山森聡、八木聡明、杉本徳和、森本淳(2023)
目的条件付け終端価値推定とそれを用いたモデル予測制御
第26回情報論的学習理論ワークショップ(IBIS2023)

-
後藤祐汰、山森聡、八木聡明、森本淳(2023)
パラメータ空間でのネットワーク混合を用いたマルチタスク強化学習による汎化方策群の獲得
第26回情報論的学習理論ワークショップ(IBIS2023)

-
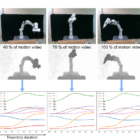
角田日維、八木聡明、山森聡、森本淳(2023)
多様な動作速度を含むエキスパートデータからの行動クローニング
第26回情報論的学習理論ワークショップ(IBIS2023)
2022
2022
2022
2022
Journal Papers
-
Matija Mavsar, Barry Ridge, Rok Pahič, Jun Morimoto, Aleš Ude (2022)
Simulation-Aided Handover Prediction From Video Using Recurrent Image-to-Motion Networks,
IEEE Transactions on Neural Networks and Learning Systems.
[Open Access]

-
Yutaka Matsuo, Yann LeCun, Maneesh Sahani, Doina Precup, David Silver,
Masashi Sugiyama, Eiji Uchibe, Jun Morimoto (2022)
Deep learning, reinforcement learning, and world models
Neural Networks, Vol. 152, 267-275.
[Open Access]
-
Takeshi D. Itoh, Koji Ishihara, Jun Morimoto (2022)
Implicit Contact Dynamics Modeling With Explicit Inertia Matrix Representation for Real-Time, Model-Based Control in Physical Environment, Neural Computation,
Neural Computation, Vol. 34, Issue 2, 360-377.
[Open Access]
2021
2021
2021
2021
Journal Papers
-
Tom Macpherson, Masayuki Matsumoto, Hiroaki Gomi, Jun Morimoto, Eiji Uchibe, Takatoshi Hikida (2021)
Parallel and hierarchical neural mechanisms for adaptive and predictive behavioral control
Neural Networks, Vol. 144, 507-521,
[Open Access]

-
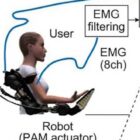
Jun-ichiro Furukawa, Shinya Chiyohara, Tatsuya Teramae, Asuka Takai, Jun Morimoto (2021)
A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control
IEEE Transactions on Human-Machine Systems, Vol. 51, Issue 5, 514-523.
[Open Access]

-
Jun-ichiro Furukawa, Jun Morimoto (2021)
Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User's Motor Goal
IEEE Robotics and Automation Letters, Vol. 6, Issue 2, 1051-1058.
[Open Access]
Conference Papers
-
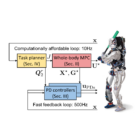
Koji Ishihara, Jun Morimoto (2021)
Computationally Affordable Hierarchical Framework for Humanoid Robot Control
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS).
[Available Online]