Publications
2024
2024
2024
2024
Conference Papers





-
Eisuke Matsubara, Satoshi Yagi, Yuta Goto, Satoshi Yamamori, Jun Morimoto (2024)
Improvement of Fault Tolerance of Quadruped Robots by Detecting Correlation Anomalies in Sensor Signals (Best Paper Award)
7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (AROB-ISBC-SWARM 2024)

-
Sho Takeda, Satoshi Yamamori, Satoshi Yagi, Jun Morimoto (2024)
An Empirical Evaluation of A Hierarchical Reinforcement Learning Method towards Modular Robot Control
7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (AROB-ISBC-SWARM 2024)
2023
2023
2023
2023
Conference Papers
-
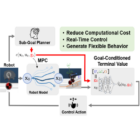
Mitsuki Morita, Satoshi Yamamori, Satoshi Yagi, Norikazu SugimotoJun Morimoto (2023)
Model Predictive Control with Goal-Conditioned Terminal Value Estimation
The 26th Information-Based Induction Sciences (IBIS 2023)

-
Yuta Goto, Satoshi Yamamori, Satoshi Yagi, Jun Morimoto (2024)
Acquisition of generalisation policy groups by multi-task reinforcement learning with network mixtures in parameter space
The 26th Information-Based Induction Sciences (IBIS 2023)

-
Kai Tsunoda, Satoshi Yagi, Satoshi Yamamori, Jun Morimoto (2023)
Behavior Cloning from Expert Data including Diverse Velocities
The 26th Information-Based Induction Sciences (IBIS 2023)
2022
2022
2022
2022
Journal Papers
-
Matija Mavsar, Barry Ridge, Rok Pahič, Jun Morimoto, Aleš Ude (2022)
Simulation-Aided Handover Prediction From Video Using Recurrent Image-to-Motion Networks,
IEEE Transactions on Neural Networks and Learning Systems.
[Open Access]

-
Yutaka Matsuo, Yann LeCun, Maneesh Sahani, Doina Precup, David Silver,
Masashi Sugiyama, Eiji Uchibe, Jun Morimoto (2022)
Deep learning, reinforcement learning, and world models
Neural Networks, Vol. 152, 267-275.
[Open Access]
-
Takeshi D. Itoh, Koji Ishihara, Jun Morimoto (2022)
Implicit Contact Dynamics Modeling With Explicit Inertia Matrix Representation for Real-Time, Model-Based Control in Physical Environment, Neural Computation,
Neural Computation, Vol. 34, Issue 2, 360-377.
[Open Access]
2021
2021
2021
2021
Journal Papers
-
Tom Macpherson, Masayuki Matsumoto, Hiroaki Gomi, Jun Morimoto, Eiji Uchibe, Takatoshi Hikida (2021)
Parallel and hierarchical neural mechanisms for adaptive and predictive behavioral control
Neural Networks, Vol. 144, 507-521,
[Open Access]

-
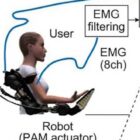
Jun-ichiro Furukawa, Shinya Chiyohara, Tatsuya Teramae, Asuka Takai, Jun Morimoto (2021)
A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control
IEEE Transactions on Human-Machine Systems, Vol. 51, Issue 5, 514-523.
[Open Access]

-
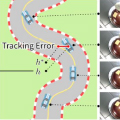
Jun-ichiro Furukawa, Jun Morimoto (2021)
Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User's Motor Goal
IEEE Robotics and Automation Letters, Vol. 6, Issue 2, 1051-1058.
[Open Access]
Conference Papers
-
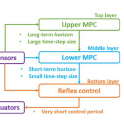
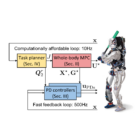
Koji Ishihara, Jun Morimoto (2021)
Computationally Affordable Hierarchical Framework for Humanoid Robot Control
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS).
[Available Online]