Publications研究業績
2025
2025
2025
2025
2025
Journal Papers

-
Ruixiang Cao, Satoshi Yagi, Satoshi Yamamori, Jun Morimoto
Poxel: Voxel Reconstruction for 3D Printing
CoRR abs/2501.10474, 2025.

-
Sho Takeda, Satoshi Yamamori, Satoshi Yagi, Jun Morimoto
An empirical evaluation of a hierarchical reinforcement learning method towards modular robot control
Artificial Life and Robotics, 30(2):245--251, May 2025.

-
Eisuke Matsubara, Satoshi Yagi, Yuta Goto, Satoshi Yamamori, Jun Morimoto
Improvement of fault tolerance of quadruped robots by detecting correlation anomalies in sensor signals
Artificial Life and Robotics, 30(2):252–259, May 2025.
Conference Papers
-
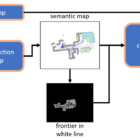
Jin Shi, Satoshi Yagi, Satoshi Yamamori, Jun Morimoto
LLM‑Guided Zero‑Shot Visual Object Navigation with Building Semantic Map
2025 IEEE/SICE International Symposium on System Integration (SII), 1274-1279, 2025.

-
潜在空間への物体操り動作軌道の埋め込みとベイズ最適化による実世界適応
古巻鉄平、八木聡明、山森聡、森本淳
ロボティクス・メカトロニクス 講演会2025 2025年5月

-
双線形Koopmanモデルによる多自由度ロボットのシステム同定とそれを用いたモデル予測制御
山崎冬矢、山森聡、八木聡明、森本淳
ロボティクス・メカトロニクス 講演会 2025 2025年5月

-
異なる形状を持つロボットにおけるマルチタスク強化学習手法の検討
絹谷龍樹、八木聡明、武田照、山森聡、森本淳
ロボティクス・メカトロニクス 講演会 2025 2025年5月
2024
2024
2024
2024
2024
Journal Papers
-
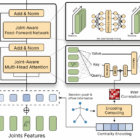
Chang Liu, Satoshi Yagi, Satoshi Yamamori, Jun Morimoto
Joint‑Aware Transformer: An Inter‑Joint Correlation Encoding Transformer for Short‑Term 3D Human Motion Prediction
IEEE Access, 12:156683-156693, 2024.
-
Satoshi Yagi, Mitsunori Tada, Eiji Uchibe, Suguru Kanoga, Takamitsu Matsubara, Jun Morimoto
Unsupervised Neural Motion Retargeting for Humanoid Teleoperation
CoRR abs/2406.00727, 2024.
-
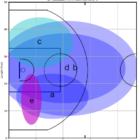
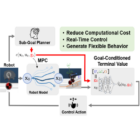
Mitsuki Morita, Satoshi Yamamori, Satoshi Yagi, Norikazu Sugimoto, Jun Morimoto
Goal‑Conditioned Terminal Value Estimation for Real‑time and Multi‑task Model Predictive Control
CoRR abs/2410.04929, 2024.
Conference Papers

-
教師無し学習を用いた動作リターゲットによるヒューマノイドテレオペレーション
八木聡明、多田充徳、内部英治、叶賀卓、松原崇充、森本淳
日本ロボット学会学術講演会予稿集(CD-ROM) 42nd 2024年

-
モジュラーロボットに向けた階層的な方策構築
武田照、山森聡、八木聡明、森本淳、森本淳
日本ロボット学会学術講演会予稿集(CD-ROM) 42nd 2024年
-
四脚ロボットの関節異常検知と耐故障向上のための考察
松原瑛将、八木聡明、後藤祐汰、山森聡、森本淳
第25回計測自動制御学会システムインテグレーション部門講演会 2024年12月

-
古巻鉄平, 八木聡明, 山森聡, 森本淳 (2024)
事前方策学習による低次元行動空間抽出と実環境における物体操り動作獲得
電子情報通信学会第54回情報論的学習理論と機械学習 (IBISML) 研究会

-
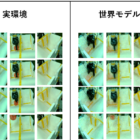
竹中郁弥, 山森聡, 森田光紀, 八木聡明, 森本淳 (2024)
世界モデル学習とそれを用いたモデル予測制御の実時間・実環境応用に向けた検討
電子情報通信学会第54回情報論的学習理論と機械学習 (IBISML) 研究会
-
石津敦弥, 山森聡, 八木聡明, 森本淳 (2024)
世界モデルにおける異なる視点からの状態推定についての検討
電子情報通信学会第54回情報論的学習理論と機械学習 (IBISML) 研究会

-
甲斐舜也, 八木聡明, 後藤祐汰, 山森聡, 森本淳 (2024)
階層強化学習を用いた四脚ロボットの異なる床環境に対する歩行方策適応
電子情報通信学会ニューロコンピューティング研究会

-
小幡岬, 八木聡明, 山森聡, 森本淳 (2024)
動的な非協力ゲームとしての複数エージェント経路探索問題の検討
電子情報通信学会ニューロコンピューティング研究会
-
小作貴司, 山森聡, 八木聡明, 森本淳 (2024)
マルチエージェント模倣学習に向けた役割推定と動作模倣に関する考察
電子情報通信学会ニューロコンピューティング研究会
-
Eisuke Matsubara, Satoshi Yagi, Yuta Goto, Satoshi Yamamori, Jun Morimoto (2024)
Improvement of Fault Tolerance of Quadruped Robots by Detecting Correlation Anomalies in Sensor Signals (Best Paper Award)
7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (AROB-ISBC-SWARM 2024)
-
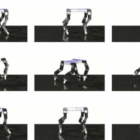
Sho Takeda, Satoshi Yamamori, Satoshi Yagi, Jun Morimoto (2024)
An Empirical Evaluation of A Hierarchical Reinforcement Learning Method towards Modular Robot Control
7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (AROB-ISBC-SWARM 2024)
2023
2023
2023
2023
2023
Conference Papers
-
森田光紀、山森聡、八木聡明、杉本徳和、森本淳(2023)
目的条件付け終端価値推定とそれを用いたモデル予測制御
第26回情報論的学習理論ワークショップ(IBIS2023)

-
後藤祐汰、山森聡、八木聡明、森本淳(2023)
パラメータ空間でのネットワーク混合を用いたマルチタスク強化学習による汎化方策群の獲得
第26回情報論的学習理論ワークショップ(IBIS2023)

-
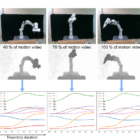
角田日維、八木聡明、山森聡、森本淳(2023)
多様な動作速度を含むエキスパートデータからの行動クローニング
第26回情報論的学習理論ワークショップ(IBIS2023)
2022
2022
2022
2022
2022
Journal Papers
-
Matija Mavsar, Barry Ridge, Rok Pahič, Jun Morimoto, Aleš Ude (2022)
Simulation-Aided Handover Prediction From Video Using Recurrent Image-to-Motion Networks,
IEEE Transactions on Neural Networks and Learning Systems.
[Open Access]

-
Yutaka Matsuo, Yann LeCun, Maneesh Sahani, Doina Precup, David Silver,
Masashi Sugiyama, Eiji Uchibe, Jun Morimoto (2022)
Deep learning, reinforcement learning, and world models
Neural Networks, Vol. 152, 267-275.
[Open Access]
-
Takeshi D. Itoh, Koji Ishihara, Jun Morimoto (2022)
Implicit Contact Dynamics Modeling With Explicit Inertia Matrix Representation for Real-Time, Model-Based Control in Physical Environment, Neural Computation,
Neural Computation, Vol. 34, Issue 2, 360-377.
[Open Access]
2021
2021
2021
2021
2021
Journal Papers
-
Tom Macpherson, Masayuki Matsumoto, Hiroaki Gomi, Jun Morimoto, Eiji Uchibe, Takatoshi Hikida (2021)
Parallel and hierarchical neural mechanisms for adaptive and predictive behavioral control
Neural Networks, Vol. 144, 507-521,
[Open Access]

-
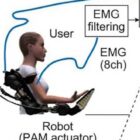
Jun-ichiro Furukawa, Shinya Chiyohara, Tatsuya Teramae, Asuka Takai, Jun Morimoto (2021)
A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control
IEEE Transactions on Human-Machine Systems, Vol. 51, Issue 5, 514-523.
[Open Access]

-
Jun-ichiro Furukawa, Jun Morimoto (2021)
Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User's Motor Goal
IEEE Robotics and Automation Letters, Vol. 6, Issue 2, 1051-1058.
[Open Access]
Conference Papers
-
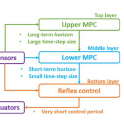
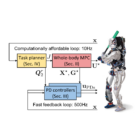
Koji Ishihara, Jun Morimoto (2021)
Computationally Affordable Hierarchical Framework for Humanoid Robot Control
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS).
[Available Online]